
 chengkaiqiang
6213262140
v-0.1.1-1:20240806
chengkaiqiang
6213262140
v-0.1.1-1:20240806
|
1 年間 前 | |
|---|---|---|
| .. | ||
| docs | 1 年間 前 | |
| include | 1 年間 前 | |
| launch | 1 年間 前 | |
| lib | 1 年間 前 | |
| node | 1 年間 前 | |
| CMakeLists.txt | 1 年間 前 | |
| README.md | 1 年間 前 | |
| g30esli_interface.sh | 1 年間 前 | |
README.md
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
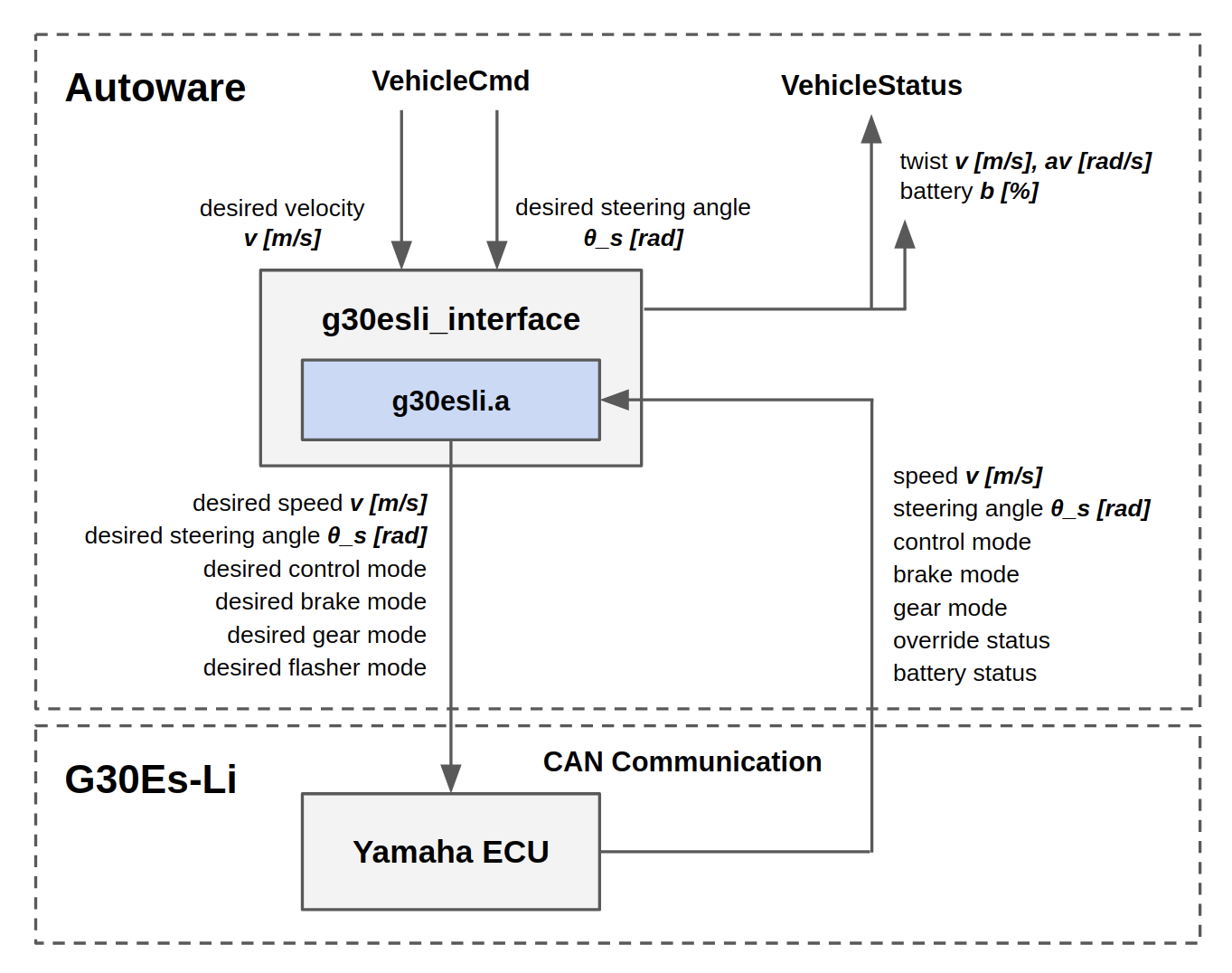
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
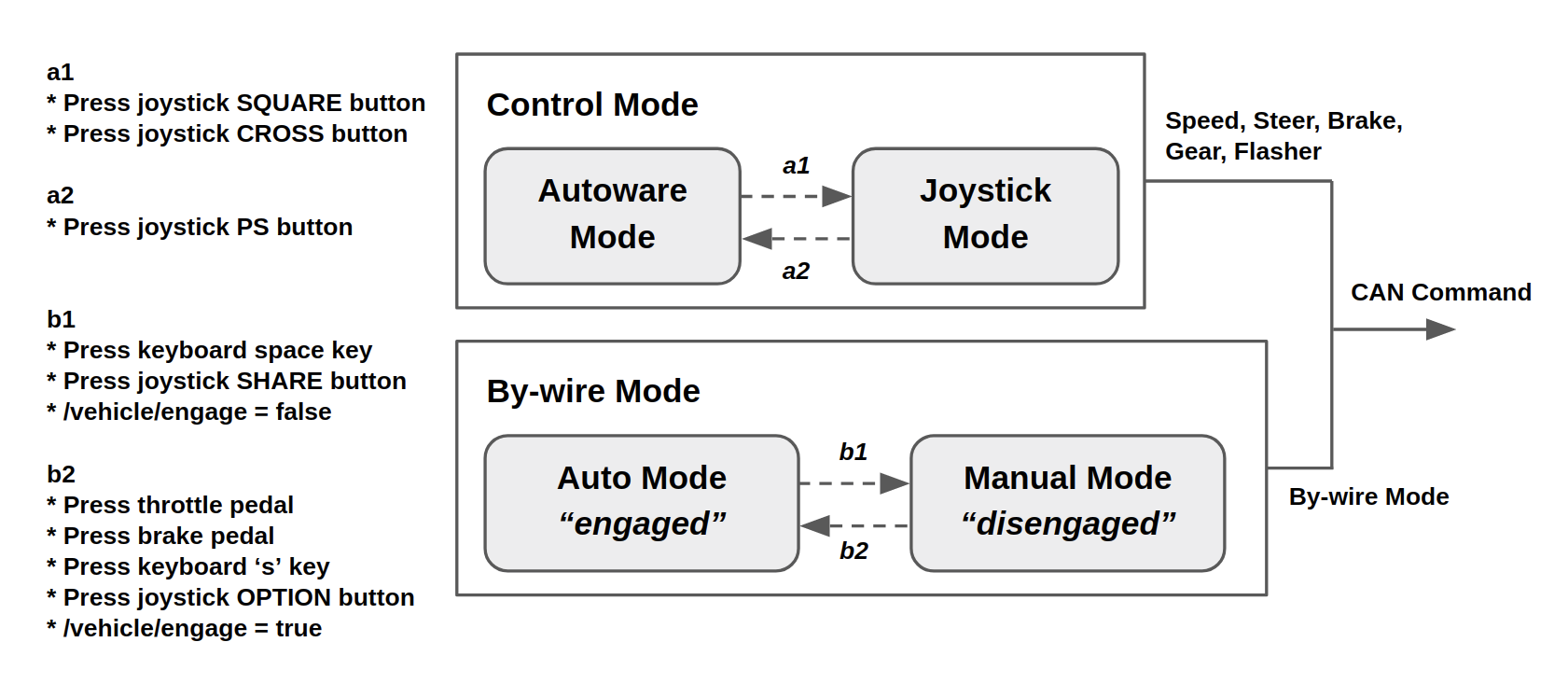
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
Confirm safety around your vehicle.
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic.Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description |
|---|---|
| CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode |
| SQUARE | Smooth brake, change to JOYSTICK mode |
| CIRCLE | Semi-emergency brake |
| TRIANGLE | Emergency brake |
| R1 | Reverse shift |
| L1 | Neutral shift |
| R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) |
| L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) |
| ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) |
| DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard |
| SHARE | Engage vehicle |
| OPTION | Disengage vehicle |
| PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int | vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]