
 chengkaiqiang
6213262140
v-0.1.1-1:20240806
chengkaiqiang
6213262140
v-0.1.1-1:20240806
|
1 سال پیش | |
|---|---|---|
| .. | ||
| carla_autoware_bridge | 1 سال پیش | |
| docs | 1 سال پیش | |
| README.md | 1 سال پیش | |
README.md
Autoware in Carla
Integration of the CARLA simulator

Requirements
- ROS Melodic
- CARLA 0.9.8
- CARLA ROS Bridge
System requirements for running CARLA.
Opens
- no compliance with traffic rules (due to missing vector map)
Setup
CARLA
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 304F9BC29914A77D &&
sudo add-apt-repository "deb [arch=amd64 trusted=yes] http://dist.carla.org/carla-0.9.8/ all main"
sudo apt install carla-simulator
Point cloud maps of CARLA towns
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys BA0F9B7406F60E23
sudo add-apt-repository "deb [arch=amd64 trusted=yes] http://dist.carla.org/carla-hdmaps/ bionic main"
sudo apt install carla-hdmaps
CARLA ROS Bridge
The CARLA ROS bridge package aims at providing a simple ROS bridge for CARLA simulator.
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 81061A1A042F527D &&
sudo add-apt-repository "deb [arch=amd64 trusted=yes] http://dist.carla.org/carla-ros-bridge-melodic/ bionic main"
sudo apt install carla-ros-bridge-melodic
Run
To run Autoware within CARLA please use the following execution order:
- CARLA Server
- Autoware (including carla-ros-bridge and additional nodes)
You need two terminals:
#Terminal 1
cd /opt/carla/bin
./CarlaUE4.sh
For details, please refer to the CARLA documentation.
#Terminal 2
export CARLA_MAPS_PATH=/opt/carla/HDMaps/
source /opt/carla-ros-bridge/$ROS_DISTRO/setup.bash
source ~/autoware.ai/install/setup.bash
roslaunch carla_autoware_bridge carla_autoware_bridge_with_manual_control.launch
Multi machine setup
You can run Autoware and CARLA on different machines. To let the CARLA Autoware bridge connect to a remote CARLA Server, execute roslaunch with the following parameters
roslaunch host:=<hostname> port:=<port number> carla_autoware_bridge carla_autoware_bridge_with_manual_control.launch
Customization
Ego Vehicle
The setup of the sensors is defined within sensors.json.
carla_ego_vehicle reads the file and spawn the ego vehicle and the sensors. The spawn point can be specified by a launch file argument, otherwise a random one is used.
Manual Control
The ROS node carla_manual_control is used to visualize the simulation (from an ego perspective). It is completely optional.
By pressing B it is possible to override the steering that is received by Autoware.
Route Creation
Routes are provided by carla_waypoint_publisher. It is possible to specify a goal with RVIZ or by publishing to a topic.
Development support
Use CARLA Ground Truth Objects
You can skip the Autoware perception by using the ground truth objects from CARLA. Therefore disable all relevant Autware perception nodes and execute:
rosrun carla_autoware_bridge carla_to_autoware_detected_objects
The objects get then published to /tracked_objects.
Additional Functionality
There are additional nodes available in the CARLA ROS bridge repo. Please have a look here.
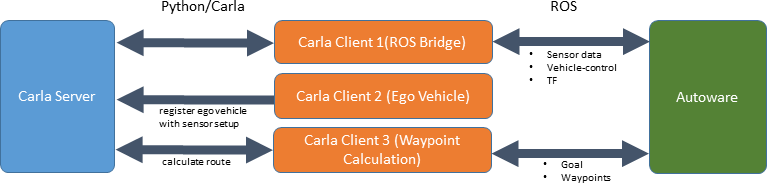
Design
Beside several ROS-only nodes, the bridge contains three CARLA Clients.
- ROS Bridge - Monitors existing actors in CARLA, publishes changes on ROS Topics (e.g. new sensor data)
- Ego Vehicle - Instantiation of the ego vehicle with its sensor setup.
- Waypoint Calculation - Uses the CARLA Python API to calculate a route.
Scenario Execution
It is possible to use CARLA scenario runner in conjunction with Autoware: Documentation.